Arduino Radar: Utveckla med två ultraljudssensorer
I dagens teknologiska värld letar vi ständigt efter innovativa sätt att applicera Arduino för att skapa fantastiska projekt. Ett av de mest spännande områdena är användningen av radarsensorer, som gör det möjligt att utveckla användbara och interaktiva system. I detta projekt ska vi fokusera på att bygga en Arduino radar med två ultraljudssensorer, som kommer att ge oss möjlighet till en fullständig 360° mätning av omgivningarna.!
Det finns många tillämpningar för en radar 360, från rumsövervakning till robotnavigering. Vi kommer att gå igenom alla steg som krävs för att bygga denna radar och samla in data, samt hur vi kan visualisera den insamlade informationen med hjälp av Processing. Genom att följa denna guide kommer du att få en djupare förståelse för hur man arbetar med radar sensor Arduino och hur man kan utveckla intressanta projekt med hjälp av ultraljudssensorer.
- Vad är Arduino Radar?
- Komponenter som behövs
- Installera och konfigurera Arduino
- Anslutning av ultraljudssensorer
- Skriva Arduino-koden
- Förbereda din Processing-miljö
- Kommunikation mellan Arduino och Processing
- Visualisering av data
- Felsökning av vanliga problem
- Sammanfattning
- Framtida utvecklingsmöjligheter
Vad är Arduino Radar?
Arduino radar är en innovativ lösning för att mäta avstånd i omgivningen med hjälp av ultraljudssensorer. Genom att använda en kombination av ultraljudssensorer och möjligen även andra komponenter, kan vi skapa en 360° radarliknande mätning. Detta diagram kan visa avståndet till olika föremål runt i kretsen av sensorerna.
Många kan fråga sig varför vi använder radar sensor Arduino för detta ändamål. Anledningen är att Arduinon erbjuder en användarvänlig plattform för att styra sensorerna och bearbeta de insamlade data. Denna data kan sedan användas för att skapa intressanta visualiseringar eller implementeras i mer komplexa system som robotar eller övervakningssystem. Med en radar 360 har vi möjlighet att upptäcka föremål i en hel cirkel runt sensorerna, vilket ger oss en fantastisk grad av noggrannhet och effektivitet.
Komponenter som behövs
För att bygga en Arduino radar med två ultraljudssensorer behöver vi en rad olika komponenter. Här är en lista över de grundläggande delarna som du kommer att behöva:
- Arduino Uno eller liknande microcontroller
- Två ultraljudssensorer (t.ex. HC-SR04)
- Kopplingssladdar
- En breadboard eller ett liknande monteringssystem
- Dator med Arduino IDE och Processing installerat
- Valfritt: En display för realtidsvisualisering
Installera och konfigurera Arduino
Innan vi kan börja med koden är det viktigt att vi installerar och konfigurerar vår Arduino korrekt. Följ dessa steg:
- Besök Arduino officiella webbplats för att ladda ner och installera Arduino IDE.
- Anslut din Arduino till datorn via USB.
- Öppna Arduino IDE och välj den rätta COM-porten för din enhet under ‘Verktyg’ > ‘Port’.
- Kontrollera att Arduino-kortet är inställt på korrekt typ under ‘Verktyg’ > ‘Kort’ och välj ditt kort (t.ex. Arduino Uno).
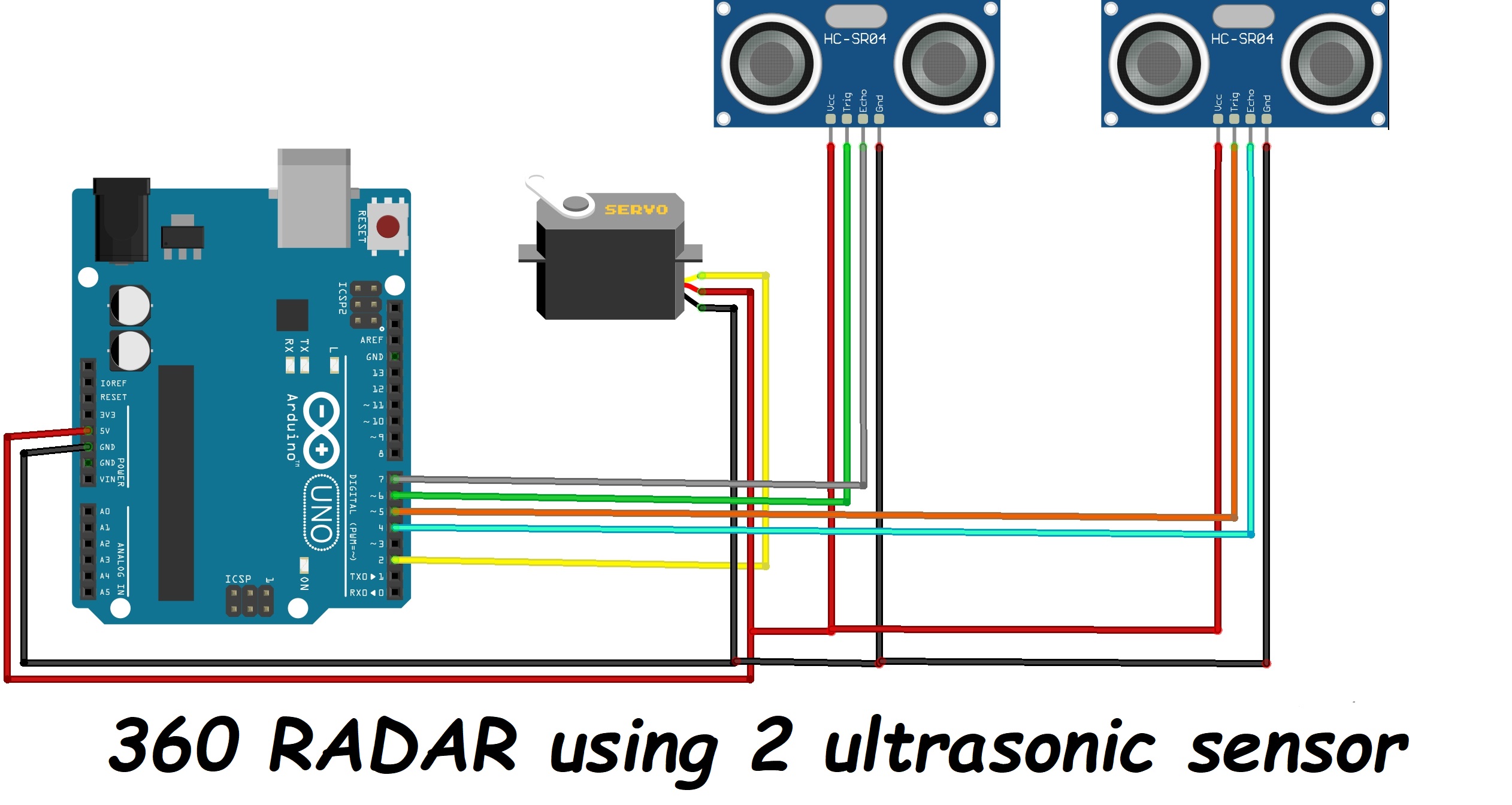
Anslutning av ultraljudssensorer
Nu när vi har vår Arduino konfigurerad, är nästa steg att ansluta våra ultraljudssensorer. En typisk ultraljudssensor, som HC-SR04, har fyra pinnar: VCC, Trigger, Echo, och GND. Här är hur du kan ansluta dem:
- VCC (spänning) till 5V på Arduinon.
- GND (jord) till GND på Arduinon.
- Trigger-pin till en valfri digital pin (t.ex. pin 9).
- Echo-pin till en annan valfri digital pin (t.ex. pin 10).
Upprepa ovanstående steg för den andra ultraljudssensorn och använd olika pinnar på Arduinon för att undvika konflikter.
Skriva Arduino-koden
När alla komponenter är anslutna och klara kan vi börja skriva koden för Arduino radar. Här är ett grundläggande exempel på hur koden kan se ut:
#include <NewPing.h>
#define TRIGGER_PIN1 9
#define ECHO_PIN1 10
#define TRIGGER_PIN2 11
#define ECHO_PIN2 12
#define MAX_DISTANCE 200
NewPing sonar1(TRIGGER_PIN1, ECHO_PIN1, MAX_DISTANCE);
NewPing sonar2(TRIGGER_PIN2, ECHO_PIN2, MAX_DISTANCE);
void setup() {
Serial.begin(115200);
}
void loop() {
delay(50);
unsigned int uS1 = sonar1.ping();
unsigned int uS2 = sonar2.ping();
Serial.print(uS1 / US_ROUNDTRIP_CM);
Serial.print(",");
Serial.println(uS2 / US_ROUNDTRIP_CM);
}
Denna kod använder biblioteket NewPing för att enkelt få avståndsmätningar från våra ultraljudssensorer och skickar dem via seriell kommunikation.
Förbereda din Processing-miljö
Processing är ett fantastisk verktyg för att visualisera data, så för att kunna skapa en realtidsvisualisering av våra radar sensor Arduino mätningar, kommer vi att förbereda vår Processing-miljö. För att göra detta, följ dessa steg:
- Ladda ner och installera Processing från dess officiella webbplats.
- Öppna Processing-programmet och skapa en ny sketch.
- Installera Serial-biblioteket om det inte redan finns (det ingår oftast redan i installationspaketet).
Kommunikation mellan Arduino och Processing
För att kommunicera mellan vår Arduino och Processing, kommer vi att behöva en kodsnutt i Processing som kan läsa av de data som skickas från Arduino. Här är en grundläggande Processing-kod för att göra detta:
import processing.serial.*;
Serial myPort;
String[] values;
float distance1, distance2;
void setup() {
size(800, 800);
String portName = Serial.list()[0]; // Ändra index om flera portar finns
myPort = new Serial(this, portName, 115200);
}
void draw() {
if (myPort.available() > 0) {
String val = myPort.readStringUntil('n');
if (val != null) {
values = split(trim(val), ',');
if (values.length == 2) {
distance1 = float(values[0]);
distance2 = float(values[1]);
}
}
}
background(255);
fill(0);
ellipse(width/2, height/2, distance1*2, distance1*2);
ellipse(width/2, height/2, distance2*2, distance2*2);
}
Denna kod öppnar den första tillgängliga COM-porten och läser av mätningarna från Arduino. Avståndet för de två sensorerna visualiseras som cirklar i mitten av fönstret, där radien är proportionell mot de uppmätta avstånden.
Visualisering av data
Nu när vi har all kod och alla anslutningar på plats kan vi börja visualisera data. När du kör både Arduino och Processing-programmet kommer du att se cirklar i ett 2D-radar-liknande diagram. Denna visualisering ger dig en tydlig bild av var föremål är belägna i förhållande till sensorerna.
Felsökning av vanliga problem
Det kan alltid uppstå problem när du arbetar med elektronik och programmering. Här är några vanliga problem och hur du kan lösa dem:
- Ingen data visas i Processing: Kontrollera att rätt COM-port är vald och att hastigheten är korrekt inställd (115200).
- Sensorerna ger felaktiga avstånd: Kontrollera kablage och se till att sensorerna är korrekt i linje för att mäta avstånd.
- Programmet fryser: Se till att du har angett en korrekt och säker kodskrift för både Arduino och Processing.
Sammanfattning
Att bygga en Arduino radar med två ultraljudssensorer har visat sig vara ett fantastiskt projekt. Genom att kombinera hårdvara och programvara har vi lärt oss att skapa ett enkelt visualiseringssystem för avståndsmätningar i 360°. Denna teknik kan appliceras i många olika tillämpningar, från robotteknik till säkerhetssystem.
Framtida utvecklingsmöjligheter
Det finns många framtida utvecklingsmöjligheter för detta projekt. Du kan exempelvis:
- Integrera fler sensorer för mer detaljerad datainsamling.
- Använd en Raspberry Pi för mer avancerade databehandlingar.
- Skapa ett separat användargränssnitt för att presentera data på ett visuellt tilltalande sätt.
- Implementera maskininlärning för att förbättra objektigenkänning.
Genom att utforska dessa aspekter har du möjlighet att bygga ett mycket kraftfullt radar 360 system som kan användas i olika teknologiska tillämpningar och projekt. En radar sensor Arduino kan kämpa fram tolkning och användning av sensordata i framtida innovationer. Tveka inte att experimentera och utforska de olika utmaningarna och lösningarna!
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? Arduino Radar: Utveckla med två ultraljudssensorer Du kan se mer här NanoPi.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll