Fjärrstyrd robothand med Arduino – Hur gör man
Fjärrstyrd robothand med Arduino – Hur gör man
Att bygga en fjärrstyrd robothand med hjälp av Arduino är en spännande och lärorik utmaning för alla teknikentusiaster. Denna robot hand kontroll kan användas för en mängd olika applikationer, från simple underhållning till mer avancerade användningar som DIY proteshand. I den här artikeln kommer vi att gå igenom hela processen för att skapa en händig robot med fjärrkontroll, så att du kan utforska de oändliga möjligheterna med robotik och Arduino.
Vi kommer att fokusera på hur man använder Arduino LilyPad för att läsa av flexsensorer kopplade till fingrarna, vilket möjliggör en hög grad av rörelse och kontroll. Genom att följa de steg-för-steg-instruktioner vi ger, kommer du snart att ha en fullt fungerande fjärrstyrd robothand som du kan styras med hjälp av en fjärrkontroll. Låt oss dyka rakt in i projektet!
Vad är en fjärrstyrd robothand?
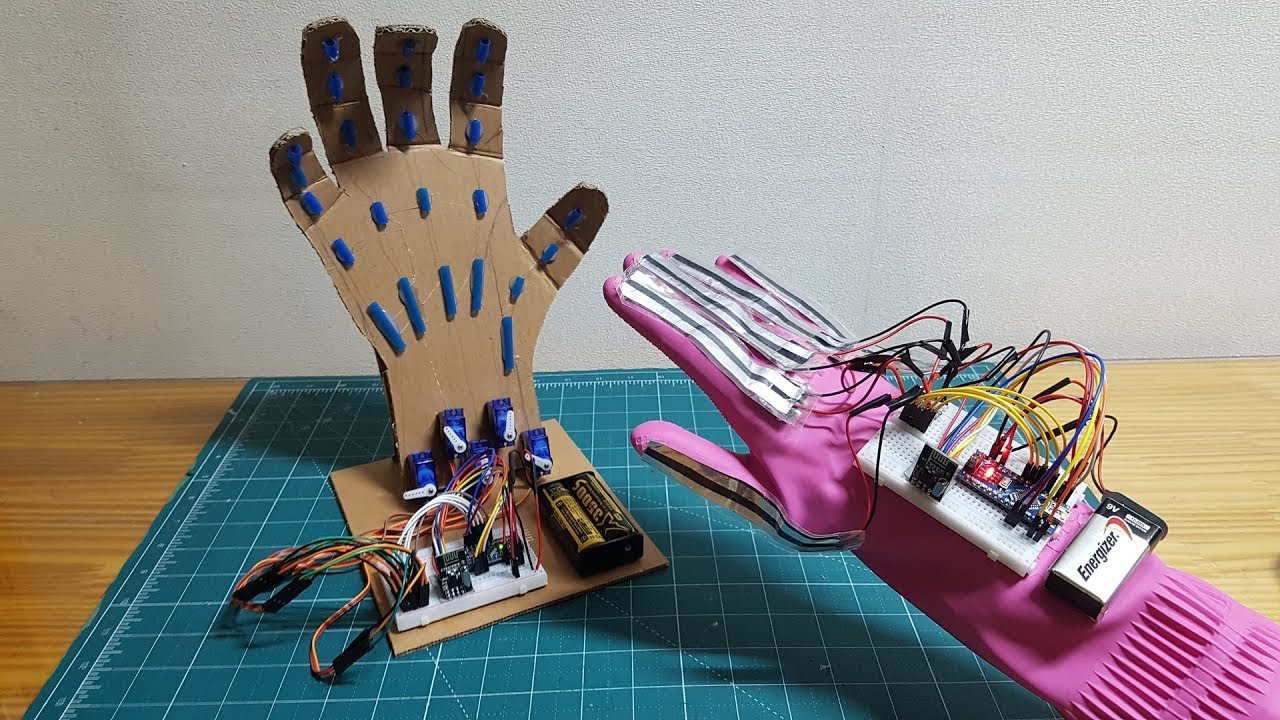
En fjärrstyrd robothand är en mekanisk apparat som har utformats för att efterlikna rörelserna av en mänsklig hand. Den är oftast utrustad med servomotorer som gör det möjligt att styra handens rörelser med hög precision. Detta gör projektet till en naturlig plattform för experimentering och inlärning inom både programming och robotik.
Genom att använda flexsensorer får du förmågan att mäta hur mycket varje finger böjs, vilket sedan kan omvandlas till digitala signaler för att styra handens rörelser. En robot hand kontroll som denna ger dig möjlighet att fördjupa dig i både elektronik och mekanik, vilket gör det till ett mycket givande projekt för alla nivåer av tekniska färdigheter.
Material och verktyg som behövs
- Arduino LilyPad
- Flexsensorer (5 stycken för varje finger)
- Servomotorer (5 stycken för varje finger)
- Resistorer (10kΩ)
- Kopplingskablar
- Bradboard (eller liknande för prototypning)
- En fjärrkontroll (alternativt en smart telefon via Bluetooth)
- Strömkälla (batteri)
- Programvaran Arduino IDE
- Skruvmejsel, lim och eventuella material för att bygga handens struktur (t.ex. plast eller kartong)
Steg-för-steg guide till konstruktion
För att konstruera en fjärrstyrd robothand med Arduino följer vi en serie steg som hjälper oss att sätta ihop alla komponenter. Nedan finner du en steg-för-steg-guide som du kan följa:
1. Bygg handens struktur
Börja med att skapa en basstruktur för din robot hand. Detta kan göras med hjälp av plast eller kartong. Försäkra dig om att varje finger har tillräckligt med utrymme för att röra sig, samt att servomotorerna är korrekt placerade. Använd skruvar och lim för att fästa delarna ihop, så att de är stabila och hållbara för rörelser.
2. Koppling av flexsensorer till fingrarna
På varje finger måste du fästa flexsensorer. Dessa sensorer kommer att mäta böjningen av varje finger och skicka dessa data till Arduino. Anslut en 10kΩ resistor till varje flexsensor och koppla dem till de analoga ingångarna på din Arduino LilyPad. Det är viktigt att notera vilka ingångar du använder så att du kan programmera dem korrekt.
3. Programmering av Arduino LilyPad
Nästa steg innebär att programmera din Arduino för att känna av och tolka signalerna från flexsensorerna. Starta med att initialisera seriell kommunikation och sedan ställa in ingångarna som indata. Under den kontinuerliga loopen kommer Arduino att läsa av flexsensorernas värden och kalibrera maximala och minimala för att anpassa rörelserna korrekt.
4. Kalibrering av flexsensorer
Kalibrering är en avgörande del av processen. När handen är helt öppen, registrera det maximala värdet för varje sensor. På samma sätt, när handen är stängd, registrera det minimi värdet. Dessa värden kommer att användas för att mappa flexsensorernas utdata till de rörelser du vill att din robot hand ska utföra.
5. Styrning av servomotorer
När sensorernas värden har kalibrerats, är det dags att översätta dessa data till rörelser av servomotorerna. Du kommer att mappa de kalibrerade sensorvärdena till ett intervall mellan 0 och 180 grader för att styra hur mycket varje finger ska röra sig. Kom ihåg att konfigurationen av servomotorerna beror på hur handens struktur har byggts.
6. Testning och felsökning
När allt är installerat och programmerat är det dags för testning av din fjärrstyrda robothand. Se till att alla rörelser fungerar som de ska och att fjärrkontrollen kommunicerar korrekt med Arduino. Om något inte fungerar som förväntat, kontrollera uppkopplingar och kalibreringsinställningar. Felsökning kan som regel ta tid, men det är en viktig del av hela processen.
Slutord och framtida förbättringar
Att bygga en fjärrstyrd robothand med hjälp av Arduino är en fantastisk lärandeupplevelse. Genom att följa dessa steg kan du lätt skapa en robot hand kontroll som inte bara fungerar bra, utan också inspirerar till vidare utveckling. Du kan experimentera med olika sensorer, använda trådlösa moduler för att förbättra räckvidden eller implementera mjukvaruplattformar för mer avancerad styrning.
Slutgiltiga tankar och inspiration
Vi hoppas att du känner dig inspirerad av detta projekt för att skapa din egen diy robot hand och utforska den fantastiska världen av robotik. Genom att kombinera teknik, kreativitet och innovation kan du designa din egen robotisk hand och göra den lika unik som du själv. Kom ihåg att fortsätta experimentera och alltid sträva efter att utmana dina tekniska färdigheter.
Med en fjärrstyrd robothand kan du utforska oändliga möjligheter, så sätt igång och börja skapa din egen fjärrkontrollerade robothand! Tveka inte att dela dina framsteg och insikter med andra entusiaster i communityn. Lycka till!
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? Fjärrstyrd robothand med Arduino – Hur gör man Du kan se mer här NanoPi.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll