ArduCopter: Så Bygger Du Din Första ArduCopter Steg för Steg
Att bygga sin första ArduCopter kan kännas lite överväldigande, men med rätt vägledning och en systematisk metod kan alla, oavsett erfarenhet, ta de första stegen mot att skapa sin egen drönare. I denna guide kommer vi att fokusera på att ge en klar och detaljerad steg-för-steg metod för att hjälpa nybörjare att konstruera en ArduCopter från grunden.
Genom att bryta ner processen i tydliga och genomförbara steg är syftet att göra hela upplevelsen både lärorik och rolig. Förutom att diskutera nödvändiga komponenter och verktyg, kommer vi även att ta en titt på vanliga problem och lösningar, för att säkerställa att ditt projekt aldrig stannar av. Låt oss dyka in i världen av ArduCopter och börja vårt spännande projekt!
- Vad är ArduCopter?
- Verktyg och Material Du Behöver
- Steg 1: Montera Ramen
- Steg 2: Installera Motorer och ESC:er
- Steg 3: Koppla GPS och APM
- Steg 4: Mottagare och Sändare
- Steg 5: Kalibrera Sensorer
- Steg 6: Testflygning
- Vanliga Problem och Lösningar
- Sammanfattning och Framtida Utrymmen för Förbättringar
Vad är ArduCopter?
En ArduCopter är en open-source multikopter som drivs av ArduPilot, vilket är en av de mest populära programvarorna för radiostyrda flygfarkoster. Den används av hobbyister och professionella och erbjuder ett stort antal funktioner, inklusive GPS-styrd flygning, autonom navigering och mycket mer. Om du drömmer om att flyga din egen drönare, så är ArduCopter ett utmärkt val för både nybörjare och erfarna byggare.
Systemet erbjuder flera konfigurationsmöjligheter och kan anpassas utefter användarens behov. Med en ArduCopter kan användaren utföra allt från grundläggande flygningar till avancerad bildtagning och kartläggning. I denna artikel kommer vi beskriva hur du bygger din egen ArduCopter och vilka verktyg och material du behöver för att komma igång.
Verktyg och Material Du Behöver
Innan du påbörjar bygget av din ArduCopter är det viktigt att ha alla nödvändiga verktyg och material till hands. Här listar vi de mest grundläggande komponenterna och verktygen som du kommer att behöva:
- Ramen: En stabil och lätt ram är grundläggande för att bygga din ArduCopter.
- Motorer: Vanligtvis 4 motorer behövs, en för varje arm av drönaren.
- ESC:er (Electronic Speed Controllers): Du behöver en ESC för varje motor, som kontrollerar hastigheten.
- APM (ArduPilot Mega): Huvudkontrollenheten i din ArduCopter.
- GPS-modul: För GPS-baserad navigering.
- Mottagare och sändare: För att kommunicera mellan din ArduCopter och din fjärrkontroll.
- Batteri: För att driva hela systemet.
- Verktyg: Lödkolv, skruvmejslar, borrmaskin och en avbitartång.
Att ha dessa komponenter redo innan du börjar bygga din ArduCopter kommer att underlätta processen och säkerställa att du har allt du behöver för att slutföra projektet.
Steg 1: Montera Ramen
Det första steget i bygget av din ArduCopter är att montera ramen. Ramen fungerar som stommen och stödjer alla andra komponenter. Här är vad du behöver göra:
- Ta fram ramdelarna och kontroller att du har alla delar.
- Använd skruvar och muttrar för att sätta ihop ramen enligt tillverkarens manual. Se till att allt är ordentligt åtdraget.
- Kolla att ramen är stabil och att det inte finns lösa delar.
Genom att säkerställa att ramen är korrekt monterad, lägger du grunden för ett lyckat byggprojekt av din ArduCopter.
Steg 2: Installera Motorer och ESC:er
Nästa steg är att installera motorerna och ESC:erna på ramen. Dessa komponenter är avgörande för att ArduCopter ska flyga ordentligt. Följ dessa instruktioner:
- Fäst motorerna på de avsedda platserna på ramen. Se till att de är säkert fastsatta.
- Anslut varje ESC till motsvarande motor. Det är viktigt att följa färgkoden på kablarna (vanligtvis röd för ström, svart för jord, och annan färg för signal).
- Koppla sedan varje ESC till de korrekta pinne i OUTPUT-sektionen på APM, som tidigare nämnt. Se till att varje kabel är korrekt ansluten för att undvika fel.
Genom att noggrant installera motorer och ESC:er, säkerställer du en effektiv och säker flygning för din ArduCopter.
Steg 3: Koppla GPS och APM
För att få den fulla funktionen av din ArduCopter, är det viktigt att koppla GPS-enheten korrekt. Följ dessa steg:
- Fäst GPS-enheten på ramen, vanligtvis på en upphöjd del för att undvika störningar från motorerna.
- Anslut GPS:ens två kablar till L2C-porten samt de fyra kablarna till GPS-porten på APM.
- Kontrollera att alla anslutningar är säkra och att inga kablar är skadade innan du går vidare.
Genom att säkerställa att GPS-enheten är korrekt kopplad, får du bättre navigationsmöjligheter och därmed en mer stabil flygning på din ArduCopter.
Steg 4: Mottagare och Sändare
För att kunna styra din ArduCopter behövs en mottagare och en sändare. Här är stegen för installationen:
- Montera mottagaren på ramen med hjälp av ett dubbelhäftande tejp eller en liknande lösning.
- Koppla mottagaren till APM via de åtta ingångspinnar som den tillhandahåller. Eftersom du använder en 6-kanalsmottagare, behövs endast 6 pinnar.
- Säkerställ att mottagaren är korrekt ansluten för att möjliggöra en stabil signal mellan SUVn och din ArduCopter.
Genom att korrekt koppla mottagaren och sändaren, kommer du att kunna styra din ArduCopter utan problem.
Steg 5: Kalibrera Sensorer
Innan du kan börja flyga din ArduCopter, måste du kalibrera sensorerna för att säkerställa att all information är korrekt och fungerande. Följ dessa steg:
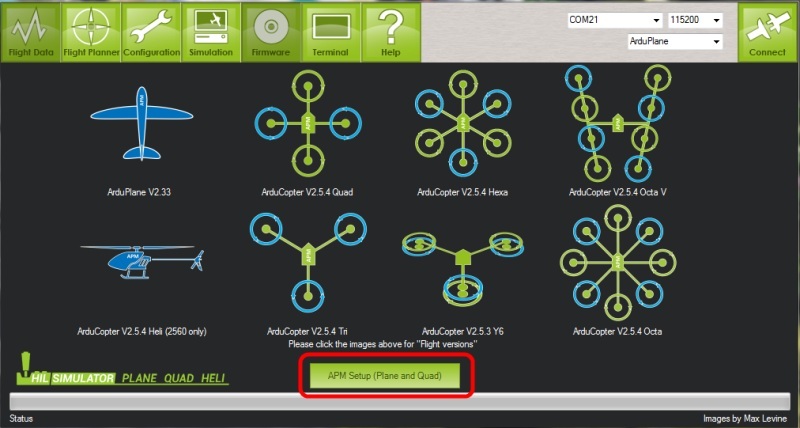
- Anslut din ArduCopter till datorn och öppna Ground Control Software (exempelvis Mission Planner).
- Följ instruktionerna för kalibrering av kompass, accelerometer och gyroskop.
- Testa kalibreringen för att säkerställa att alla sensorer ger rätt information. Justera vid behov.
Genom att noggrant kalibrera dina sensorer, säkerställer du en trygg och stabil flygning för din ArduCopter.
Steg 6: Testflygning
När alla komponenter är installerade och kalibrerade, är det dags för testflygning. Följ dessa steg innan du lyfter:
- Välj en säker och öppen plats för testflygningen, fri från hinder och människor.
- Kontrollera att alla komponenter är ordentligt fastsatta och att batteriet är fulladdat.
- Utför en grundläggande funktionstest genom att starta motorn och observera att alla motorer fungerar som de ska.
- Lyft försiktigt din ArduCopter några centimeter uppåt och håll den stabil för att bedöma flygens stabilitet.
Efter att ha följt dessa steg kan du njuta av ditt första flyg med din ArduCopter.
Vanliga Problem och Lösningar
När du bygger och flyger din ArduCopter, kan du stöta på några vanliga problem. Här är några av de mest förekommande problemen och hur du kan lösa dem:
- Motorer snurrar inte: Kontrollera att alla anslutningar mellan motorer och ESC:er är korrekt kopplade.
- Flygning är instabil: Kalibrera sensorerna igen och kontrollera ramens stabilitet.
- GPS-signal förloras: Kontrollera GPS-anslutningarna och se till att inget blockerar signalen.
Med dessa lösningar kan du snabbt diagnostisera och åtgärda vanliga problem som uppstår vid användning av din ArduCopter.
Sammanfattning och Framtida Utrymmen för Förbättringar
Att bygga en ArduCopter är en fantastiskt lärorik och tekniskt givande process. Genom att följa våra steg-för-steg-instruktioner har du skapat din egen drönare, som kan användas för att utforska himlen. Men byggandet av en ArduCopter är bara början. Det finns alltid utrymme för förbättringar.
Framtida uppgraderingar kan inkludera bättre motorer, en kraftfullare processor eller högre kvalitet på kameror för bildtagning. Experimentera även med olika flygkonfigurationer och sätt att optimera prestandan. Med rätt kunskap och erfarenhet kan du förvandla din ArduCopter till ett verkligt fantastiskt flygfarkost.
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? ArduCopter: Så Bygger Du Din Första ArduCopter Steg för Steg Du kan se mer här Arduino.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll