Arduino båt autopilot: Upptäck nya funktioner i Version 2!
Välkommen till vår djupgående utforskning av den fantastiska Arduino båt autopilot:en, särskilt dess senaste och mest spännande iteration, Version 2! Med avancerade funktioner och förbättrad kapabiliteter, revolutionerar denna innovativa teknik vårt sätt att navigera på vattnen. I denna artikel kommer vi att gå igenom alla aspekter av denna fantastiska produkt, utforska dess nya funktioner och förstå hur den kan förvandla seglingserfarenheten för både entusiaster och professionella.
Arduino communityn har alltid varit i framkanten av teknologisk innovation och Version 2 av arduino autopilot boat:n är inget undantag. Den har byggts på de solid kamera som redan finns och lagt till extra lager av intelligens och kontroll. Från förbättrad användarinteraktion till avancerade sensortekniker, är det dags att dyka ner i de nya och spännande funktionerna som gör denna autopilot till ett måste för alla båtägare.
Introduktion
När vi talar om en arduino båt autopilot, öppnar vi en dörr till en värld av automatisering och precision. En autopilot är ingen nyhet inom sjöfarten, men med Arduino-plattformen får vi möjlighet att skräddarsy och optimera systemet för våra unika behov. Den senaste versionen har flera funktioner som möjliggör en mer sömlös och effektiv navigationsupplevelse.
Det är inte bara en hjälp för att navigera utan också ett verktyg för att samla in data och övervaka båtens alla system, vilket ger användarna bättre kontroll och insikt. Vi kommer att utforska olika aspekter av denna autopilot, hur den fungerar och hur man kan installera och konfigurera den för bästa prestanda.
Funktioner i Version 2
Version 2 av arduino autopilot boat har en mängd nya funktioner som främjar användarvänligheten och systemets effektivitet. Bland de mest anmärkningsvärda förbättringarna finner vi:
- Förbättrat användargränssnitt: Version 2 kommer med en ny och lättanvänd meny och skärm som gör det lättare att navigera i GPS-data och inställningar.
- Avancerad PID-reglering: Förbättrade algoritmer för kontroll över båtens kurs, vilket möjliggör mer exakt navigering.
- Multisensorstöd: Enheter kan nu hantera flera olika sensorer för att samla in värdefull data om båtens omgivning.
- Fjärrkontrollsfunktioner: Användaren kan nu styra systemet på distans, vilket öppnar upp för andra styrmöjligheter.
Hur systemet fungerar
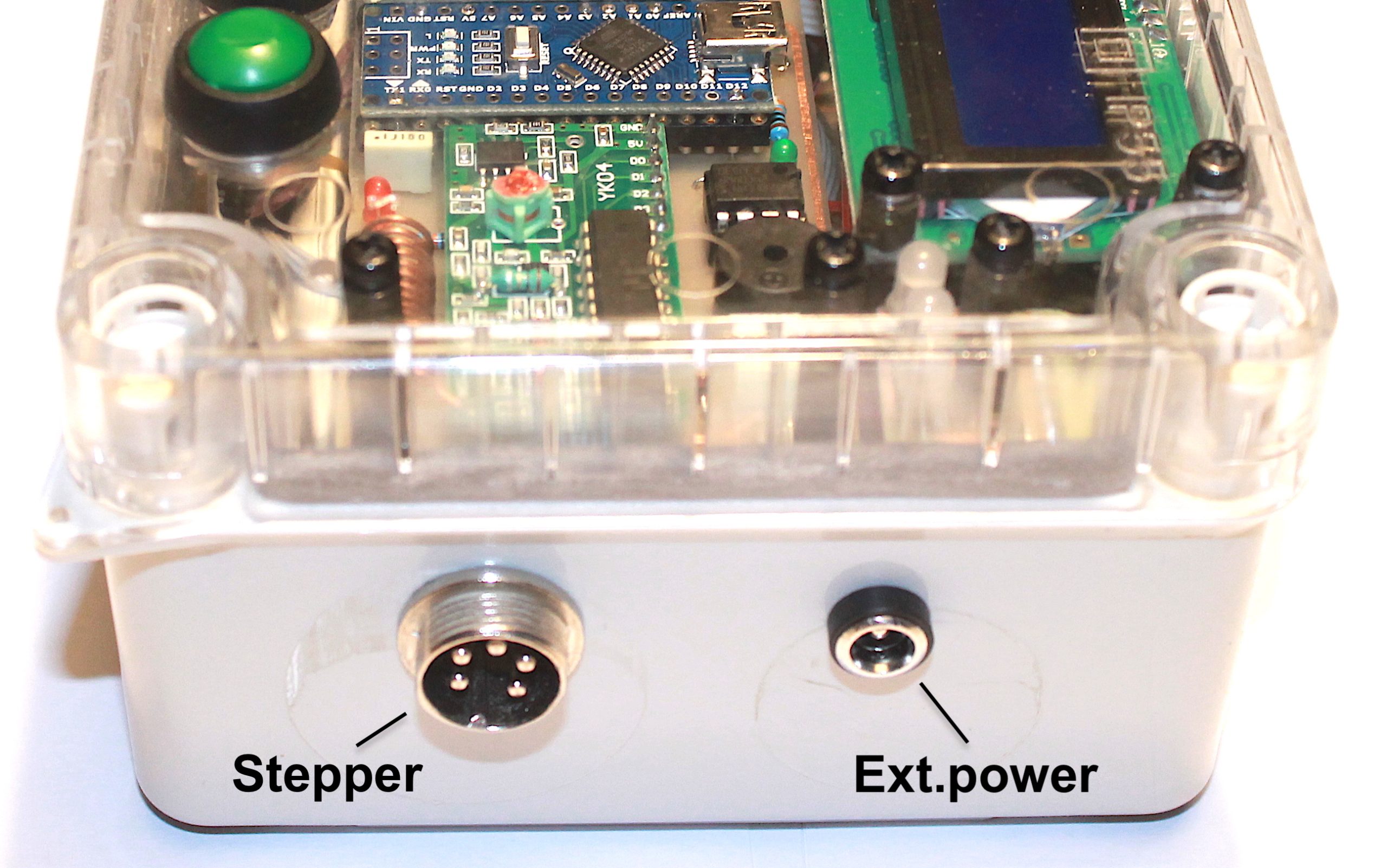
För att förstå hur arduino båt autopilot:en fungerar är det viktigt att se på dess grundläggande komponenter. Huvudprocessorn är en Arduino Nano, som är kopplad till en GPS-enhet för positionsbestämning. Systemet använder Stegmotorer för att styra segelbåtens rudder. Dessa komponenter arbetar tillsammans för att övervaka och reglera kursen.
För att säkerställa ett stabilt och säkert segling är PID-reglering (Proportional-Integral-Derivative) implementerad. Denna typ av reglering tillåter systemet att anpassa sig till förändringar i båtens kurs och göra nödvändiga justeringar för att hålla den på rätt spår, oavsett yttre påverkan som vind och ström.
Användargränssnittet
Det nya och förbättrade användargränssnittet i Version 2 har designats med tanke på användarens bekvämlighet. Användarens interaktion med systemet sker via en I2C LCD-skärm, vilken visar vital information som båtens aktuella position, kurs och olika systemstatusar. Genom att enkelt navigera genom menyer kan användarna göra anpassningar och förändringar på ett intuitivt sätt.
LCD-skärmen ger också ljudsignaler för olika händelser och alarm, vilket hjälper användaren att vara medveten om systemets status och eventuella problem som kan uppstå under segling.
PID-reglering och kursövervakning
Kursövervakning är en avgörande funktion i en arduino autopilot båt. Denna process innefattar att kontinuerligt övervaka båtens kurs i förhållande till det inställda målet, och om det behövs göra justeringar. PID-reglering används här för att förutsäga och korrigera små avvikelser i båtens riktning. Genom att optimera responsen kan systemet minimera svängningar och bibehålla en stabil rutt.
De tre komponenterna i PID-algoritmen (P, I och D) arbetar i tandem för att uppnå en balanserad och responsiv kontroll. Proportionaldelen gör snabba justeringar, integraldelen tar hänsyn till långsiktiga avvikelser, och deriverande delen förbereder systemet för framtida förändringar. Detta ger användaren tryggheten att veta att båtens kurs kommer att övervakas och justeras automatiskt, oavsett förhållandena på vattnet.
Sensorteknik och mätningar
För att maximera potentialen hos arduino båt autopilot:en, är det nödvändigt att dra nytta av effektiv sensorteknik och mätningar. Med Version 2 kan systemet ansluta till olika sensorer som hjälper till att ge insikter om båtens omgivning. Mätningar av spänning, temperatur och ström är nu standard, vilket möjliggör för användaren att hålla ett öga på båtens olika system och säkerställa att allt fungerar som det ska.
Genom att integrera olika sensorer kan användaren också analysera miljöförhållandena bättre. Data från GPS-enheter, vindsensorer och kanske även vattensensorer ger ett helhetsperspektiv som är ovärderligt för en säker och effektiv segling.
Fjärrkontroll och manuell justering
En av de mest användbara funktionerna i Version 2 är möjligheten att styra systemet via fjärrkontroll. Det ger användarna mer flexibilitet under segling, särskilt i situationer där manöverutrymme är begränsat, eller när man vill göra justeringar utan att behöva vara vid styrningen.
Fjärrkontrollsfunktionen gör det möjligt att ingripa manuellt vid behov, vilket ger användaren ett extra lager av kontroll. Den gör det också enklare att justera olika inställningar och parametrar, vilket är viktigt för att optimera seglingserfarenheten.
Installation och setup
Att installera och sätta upp arduino autopilot boat:en är en process som är relativt enkelt, även för dem som kanske inte har mycket erfarenhet av elektronik. Installationsprocessen börjar med att ansluta alla hårdvarukomponenter: Arduino-enheten, motorer, GPS, sensorer och fjärrkontroll.
När hårdvaran är på plats, följer kodning och programmering av systemet. Koden som utvecklats för Version 2 är öppen och kan anpassas för att passa individuella behov. Det är under denna fas som användaren kan ställa in specifika parametrar, testa systemets respons och justera inställningar för att uppnå bästa prestanda.
Framtida utvecklingar
Som alltid på technology fronten, finns det stora möjligheter för framtida utvecklingar av arduino båt autopilot:en. Det pågår alltid forskning och utveckling för att förbättra funktioner och användarupplevelse. Några framtida förbättringar som kan förväntas innefattar bättre integration av AI, mer avancerade sensorer och stöd för automatiska uppdateringar för programvaran.
Det är också möjligt att öppna upp för nya användartillverkade tillägg och funktioner vilket gör att communityn kring Arduino kan fortsätta att växa och bidra till utvecklingen av denna innovativa plattform.
Slutsats
Vi har nu utforskat den otroliga arduino båt autopilot:en, särskilt Version 2, vilket erbjuder många spännande och användbara funktioner för sjöfarare. Genom att kombinera avancerad teknik med användarvänlighet, gör den här autopiloten det möjligt för både amatörer och professionella att njuta av en mer avslappnad och effektiv segling.
Med framtida utvecklingar vid horisonten kommer arduino autopilot boat:en sannolikt att fortsätta att förbättras och anpassas för att möta behoven hos dagens sjöfarare. Denna teknologi lovar att inte bara förändra hur vi navigerar på vattnet, men även att erbjuda nya sätt att interagera med vår omgivning och maximera vår seglingsupplevelse. Med den kärlek som ligger bakom dess skapelse, är det ingen tvekan om att Version 2 av Arduino båt autopilot är ett ovärderligt verktyg för varje seglare.
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? Arduino båt autopilot: Upptäck nya funktioner i Version 2! Du kan se mer här NanoPi.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll