Hur fungerar bipedala robotar med Arduino-teknik
- Hur fungerar bipedala robotar med Arduino-teknik
- Bakgrund till bipedala robotar
- Vad är Arduino-teknik?
- Design och komponenter av vår robotbiped
- Hur fungerar roboten?
- Programmering och styrning med Arduino
- Experimentering med gångstilar
- Utmaningar och lösningar
- Framtida möjligheter och anpassningar
- Avslutande tankar
- Dela din egen robotupplevelse!
Hur fungerar bipedala robotar med Arduino-teknik
Vi är två unga uppfinnare, Kousheek Chakraborty och Satya Schiavina, som brinner för digital tillverkning och elektronik. Vi har alltid varit fascinerade av robotar, särskilt de som efterliknar mänskliga rörelser, vilket ledde oss till att designa en biped robot som kan gå och springa. Målet med vårt projekt var att skapa en robust och kostnadseffektiv lösning med hjälp av lättillgängliga delar och 3D-utskrift, vilket möjliggör experimentering med olika gångstilar utan att behöva oroa sig för hårdvarufel. Denna grund lägger en stabil plattform för vidareutveckling och anpassning av roboten, och vi uppmanar andra att följa med och skapa sin egen Arduino-styrda robotbiped och rösta i "Arduino Contest" om de gillar projektet.
Den teknologiska utvecklingen inom robotik har medfört att bipedala robotar har blivit en central del av många innovationer, och de allra flesta fungerar med hjälp av avancerad elektronik och programmering. Robotar som går på två ben kan inte bara utföra fysiska uppgifter, men även förstå omvärlden på ett sätt som liknar människor. Vår resa med biped robot teknologin har i hög grad involverat att utforska och lära sig mer om hur dessa maskiner fungerar, både i teori och praktik.
Genom att utnyttja Arduino-teknik kan vi designa och styra våra egna bipedal robotar, vilket ger oss ett unikt verktyg för att förstå hur sensorer, motorer och programmering samverkar för att skapa smidiga och funktionella rörelser. I den här artikeln kommer vi att dyka djupare in i hur bipedal robotar med hjälp av Arduino kan fungera, vilka utmaningar vi har stött på och de lösningar vi har hittat.
Bakgrund till bipedala robotar
Bipedala robotar har en lång historia inom forskningen. De har fascinerat ingenjörer och forskare eftersom de efterliknar människor i sitt sätt att röra sig. Genom att gå på två ben kan dessa robotar navigera i komplexa miljöer där fyrbenta robotar kanske har begränsningar. Det har gjorts många framsteg inom detta område, med utvecklingar som ASIMO av Honda och Atlas av Boston Dynamics som exempel på avancerade bipedal robotar på marknaden.
Utveckling och forskning
Forskning och utveckling av bipedala robotar har inte bara omfattat mekaniska framsteg, utan också studier kring gångmönster, balans och rörelse. Tidiga modeller av biped robotar var ofta klumpiga och svåra att styra, men nya teknologier har lett till smidigare och mer responsiva robotar. Aldrig tidigare har det funnits så många möjligheter för hobbyister och uppfinnare att bygga sina egna bipedal robotar med hjälp av kostnadseffektiva verktyg som Arduino.
Vad är Arduino-teknik?
Arduino-teknik är en öppen och lättanvänd plattform för hårdvara och programvara vilket gör den till en idealisk lösning för hobbyister och ingenjörer. Plattformen låter användare programmera mikrokontroller med hjälp av medföljande mjukvara, vilket gör det möjligt att styra motorer, sensorer och annan perifer hårdvara. Arduino har blivit synonymt med tinkering och kreativt skapande, vilket är centralt för projekt med bipedal robotar.
Komponenter av Arduino
Oftast består en Arduino-baserad robot av en mikrokontroller (t.ex. Arduino Uno, Mega eller Nano), servomotorer, sensorer (som gyroskop och accelerometrar), och en strömförsörjning. I vårt projekt har vi använt en kombination av dessa komponenter för att kunna bygga en funktionell bipedal robot. Genom att programmera mikrokontrollern kan vi styra motorerna för att efterlikna mänskliga rörelser och skapa olika gångstilar.
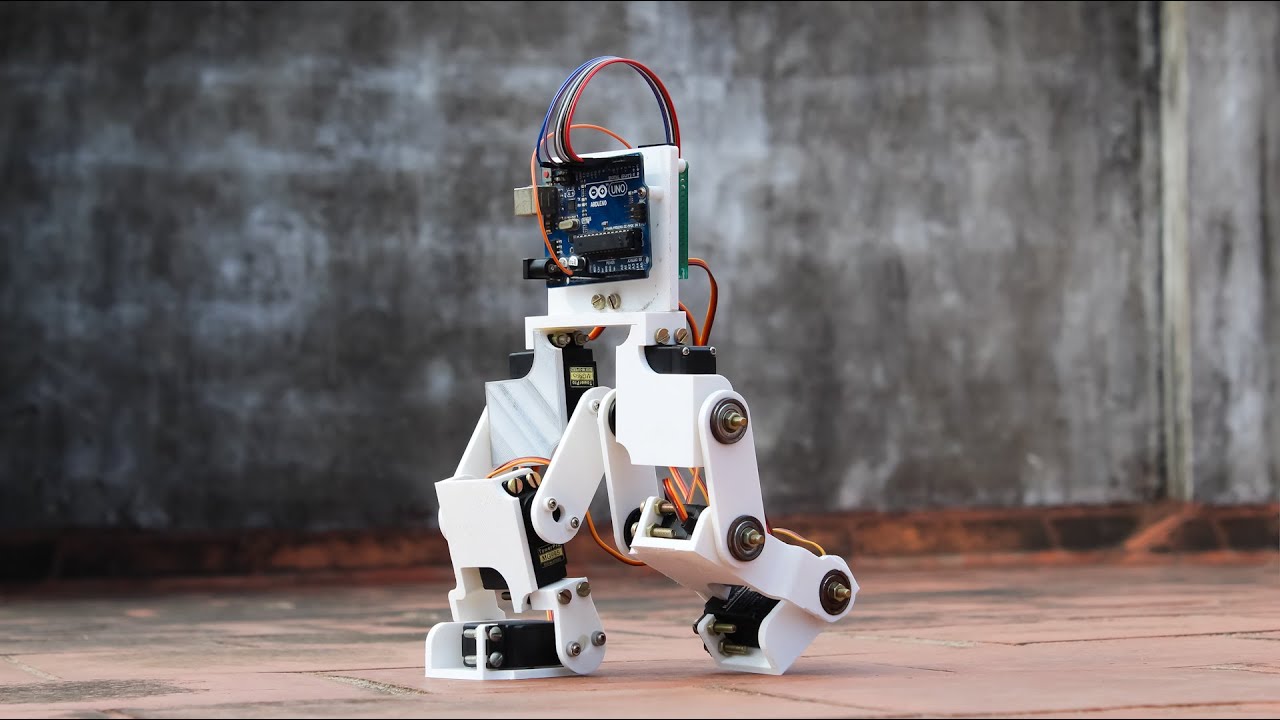
Design och komponenter av vår robotbiped
Vår biped robot har designats med fokus på flexibilitet och hållbarhet. Vi har använt 3D-utskrift för att framställa robotens kropp, vilket gör den lätt att anpassa efter våra behov. Huvudkomponenterna inkluderar flera servomotorer som möjliggör rörelse av armar och ben, stödstrukturen för stabilitet och ett kontrollsystem byggt på Arduino.
Robotens grundläggande design
- Chassi: Robotens kropp är konstruerad för att vara både lätt och stark.
- Servomotorer: Används för att kontrollera rörelsen i benen och armarna.
- Sensorer: Inkluderar gyroskop och accelerometrar för att uppnå balans och stabilitet.
- Arduino-mikrokontroller: Styrenheten som programmerar rörelser och samlar in data från sensorer.
Hur fungerar roboten?
Vårt bipedal robot fungerar genom att samordna rörelser mellan motorerna, vilket efterliknar mänsklig gång. Genom att styra motorerna i ett korrekt mönster kan roboten utföra olika rörelser, inklusive att gå framåt, bakåt och svänga. Sensortekniken bidrar till att upprätthålla balansen under dessa rörelser och gör att roboten kan justera sig själv i realtid.
Principerna bakom rörelser
Robotens rörelseprinciper bygger på att simulera mänskligt gångmönster: att gå framåt inbegriper att flytta såväl vikten som benen på ett samordnat sätt, där varje motor aktiveras baserat på programmets kod. Genom att justera motorhastigheten kan vi även experimentera med olika gångstilar, vilket gör det till en dynamisk lärande plattform.
Programmering och styrning med Arduino
Programmering är en av de mest kritiska aspekterna av att bygga en biped robot. Med hjälp av Arduino kan vi enkelt skriva kod för att styra servermotorer, hantera olika sensorer och implementera logik för robotens rörelser. Detta ger ett brett spektrum av möjligheter för att experimentera med olika aspekter av robotik.
Vad krävs för programmeringen?
- Arduino IDE: Utvecklingsmiljö för att skriva och ladda upp programmeringskod.
- Bibliotek: Specifika bibliotek som underlättar användningen av servomotorer och sensorer.
- Testning: Iterativ process där vi kontinuerligt testar robotens rörelser för att finjustera koden.
Experimentering med gångstilar
Att experimentera med olika gångstilar är en av de roliga delarna med att bygga en bipedal robot. Vi har kunnat justera motorhastigheten, rörelsemönstret och till och med implementera feedback-operational system för att möjliggöra mer komplexa rörelser. Till exempel har vi testat att få roboten att gå som en människa, hoppa eller till och med snurra.
Att skapa unika rörelser
För att skapa unika rörelser har vi använt en kombination av programmering och sensorer. När roboten går kan vi ta in data från gyroskopet för att justera balansen och styrningen. Genom att justera motorernas hastighet och sekvenser kan vi få vår biped robot att verka mer levande.
Utmaningar och lösningar
Som med alla projekt har vi stött på utmaningar under utvecklingen av vår bipedal robot. Sådana utmaningar kan inkludera problem med stabilitet, felaktig kod eller svårigheter med att kalibrera sensorerna. Genom att noggrant analysera dessa problem och implementera lösningar har vi lärt oss mycket och utvecklat vår robot ytterligare.
Vanliga problem och deras lösningar
- Stabilitetsproblem: Vi har löst stabilitetsproblem genom att justera viktfördelningen och använda flera sensorer för att samla in mer data om rörelse.
- Motorfel: Genom att använda högkvalitativa servomotorer minimerade vi risken för skade.
- Programmeringsbuggar: Iterativ testning och feedback har hjälpt oss att rätta till kodproblem snabbt.
Framtida möjligheter och anpassningar
Framtiden för vår biped robot brinner av möjligheter. Med den snabba utvecklingen inom teknologi kan vi se en väg mot att förbättra robotens rörelser och reaktioner ytterligare. Både hårdvaru- och mjukvaruuppgraderingar kan genomföras för att förfina rörelsemönster, öka hastigheten på svar och göra roboten mer autonom.
Potentiella uppgraderingar
- AI-integration: Implementerings av artificiell intelligens för att låta roboten lära sig av sina omgivningar.
- Bättre sensorer: Användning av mer avancerade sensorer för att öka noggrannheten.
- Fler rörelsemönster: Experimentera med mer komplexa och kreativa rörelsemönster.
Avslutande tankar
Att bygga och programmera en bipedal robot med hjälp av Arduino-teknik har varit en fantastisk lärandeupplevelse. Det har inte bara gett oss en djupare förståelse för robotik och programmering utan också en känsla av prestation när vi ser vår robot gå och röra sig som vi vill. Genom att dela vår erfarenhet hoppas vi kunna inspirera och entusiasmera andra ungdomar och teknikintresserade att ta steget mot att skapa sina egna robotar.
Dela din egen robotupplevelse!
Har du byggt en biped robot eller planerar du att börja? Vi skulle älska att höra från dig! Dela gärna dina berättelser, framgångar och utmaningar med oss. Vi hoppas att fler ska engagera sig i robotteknik och använda Arduino för sina egna projekt. Låt oss tillsammans utforska världen av bipedala robotar och skapa innovativa lösningar för framtiden!
Denna artikel ger en omfattande och strukturerad översikt över hur bipedala robotar fungerar med hjälp av Arduino-teknik, och inkluderar en rad olika ämnen som är relevanta för intresserade läsare.
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? Hur fungerar bipedala robotar med Arduino-teknik Du kan se mer här Arduino.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll