Gesture-Controlled Car with NRF24L01: How to Build It
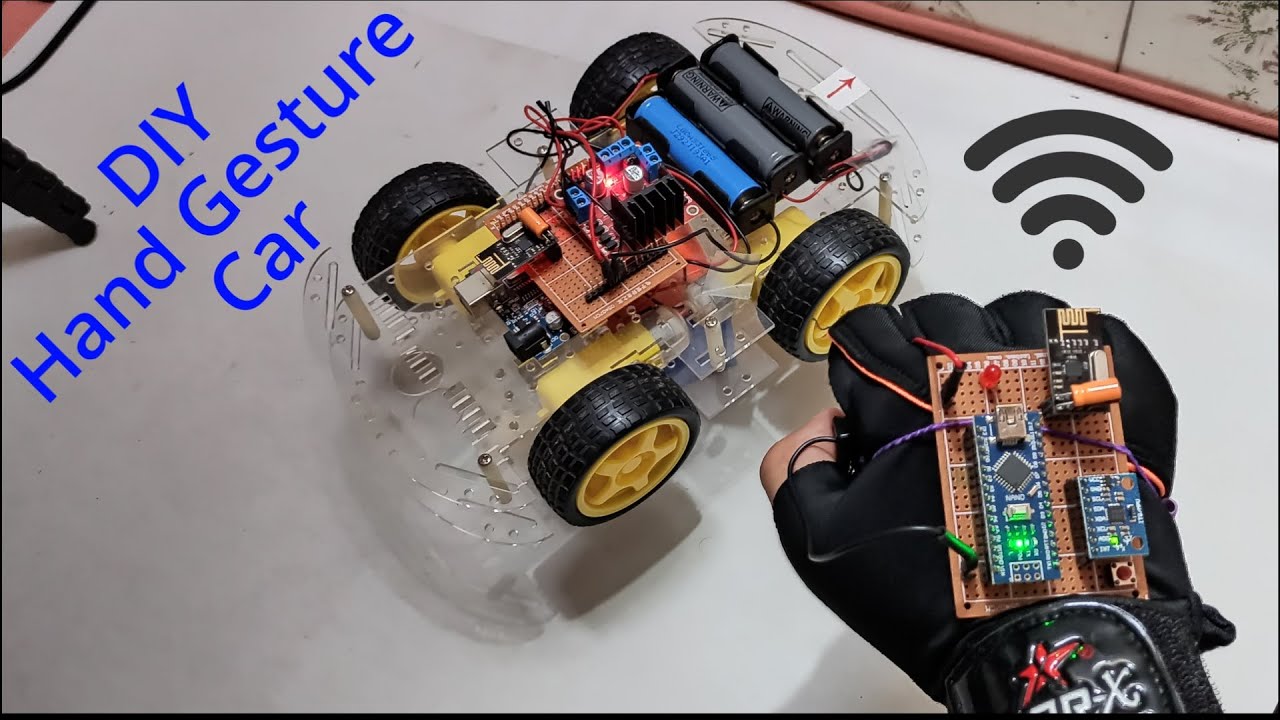
Att bygga en gestkontrollerad bil är en spännande utmaning för både hobbyister och teknikentusiaster. Med hjälp av modern teknik som NRF24L01 kan du skapa en bil som svarar på handgesters rörelser. I denna guide får du lära dig allt som behövs för att förvandla en vanlig fjärrstyrd bil till en handgestkontrollerad bil, vilket gör att du kan styra bilen med dina rörelser. Denna arduino-bilprojekt är inte bara lärorikt utan också mycket roligt att arbeta med.
Genom att använda gestkontroll kopplad till en Arduino-enhet, kan du skapa en ny och spännande upplevelse av att styra en bil. Projektet är baserat på radiofrekvenskommunikation och involverar olika steg, såsom installation av mjukvara, kodanalys och testning. Oavsett om du är en nybörjare i elektronik eller en erfaren programmerare, så kommer den här guiden att ge dig vägledning för att bygga din egen gestkontrollerad bil.
Introduktion
Föreställ dig en värld där du kan styra en bil enbart med dina handrörelser – detta är vad en gesture-controlled car erbjuder. Genom att använda en kombination av hårdvara och mjukvara kan du bygga en bil som reagerar på handrörelser. Den här teknologin, typiskt kallad hand motion remote control car, används i många olika applikationer, från leksaker till avancerade robotar.
Vad är NRF24L01?
NRF24L01 är en populär trådlös kommunikationsmodul som används för att skapa trådlösa nätverk mellan enheter. Den är känd för sin låga strömförbrukning och höga överföringskapacitet. Genom att använda NRF24L01 kan din arduino controlled car styra olika komponenter utan behov av kablar. Modulen använder SPI-protokollet för kommunikation, vilket gör den lätt att implementera med Arduino.
Nackdelar och fördelar med NRF24L01
- Fördelar:
- Låg kostnad
- Tänkbar räckvidd på upp till 100 meter
- Låg strömförbrukning
- Nackdelar:
- Kan vara känslig för interferens
- Behöver korrekt konfiguration för att fungera optimalt
Material och verktyg som behövs
För att bygga din gesture car behöver du följande material:
- 1 x Arduino-kort (t.ex. Arduino Uno)
- 1 x NRF24L01-modul
- 1 x motorstyrningsmodul (t.ex. L298N)
- 2 x DC-motorer
- 1 x plastchassi (bilens kropp)
- 1 x kraftkälla (batterier)
- Flera anslutningskablar
- En laptop eller dator för programmering
- Router eller accesspunkt (valfritt för kommunikation)
Se till att du har alla verktyg tillgängliga för att montera och koppla ihop delarna. Det kan vara bra att ha en lödkolv, tänger och en skruvmejsel till hands för att underlätta processen.
Kopplingsschema för bilens elektronik
Innan du börjar bygga är det viktigt att ha ett klart kopplingsschema. Detta schema visar hur du kopplar ihop alla elektronikdelar så att de fungerar som avsett. Här är ett enkelt kopplingsschema:
- Koppla NRF24L01 till Arduino:
- VCC till 3.3V
- GND till GND
- CE till D9
- CSN till D10
- SCK till D13
- MOSI till D11
- MISO till D12
- Koppla motorstyrningsmodulen till Arduino:
- IN1 till D3
- IN2 till D4
- IN3 till D5
- IN4 till D6
- VCC till 5V
- GND till GND
- Koppla motorerna till motorstyrningsmodulen:
- Motor 1 till OUT1 och OUT2
- Motor 2 till OUT3 och OUT4
Detta schema gör att din handgestkontrollerade bil får en bra start och korrekt koppling för att fungera effektivt.
Programvaruinstallation och bibliotek
För att din gesture control car ska fungera, behöver du installera några viktiga bibliotek. Detta inkluderar bibliotek för NRF24L01 samt ett bibliotek för motorstyrning. Följ dessa steg:
- Öppna Arduino IDE.
- Gå till “Sketch” och välj “Include Library” och sedan “Manage Libraries”.
- Sök efter “RF24” och installera det biblioteket.
- Sök efter “Servo” och installera det biblioteket (om du använder servon för styrning).
Se till att du har all programvara ordentligt installerad innan du går vidare till kodimplementeringen.
Kodgenomgång och funktioner
Nu är det dags att skriva programmet som kommer att styra din bil. Här är en grundläggande översikt av koden:
#include
#include
// Definiera NRF24L01 pins
RF24 radio(9, 10); // CE, CSN
void setup() {
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(1, 0xF0F0F0F0E1LL);
radio.startListening();
// Motor setup code goes here
}
void loop() {
if (radio.available()) {
char text[32] = "";
radio.read(&text, sizeof(text));
Serial.println(text);
// Motor control based on 'text' received
}
// Add more control commands based on gestures
}
Den här koden initierar radiosystemet och ser till att bilen svarar på signaler. Det är i detta steg du kommer att lägga till styrning av bilens rörelser beroende på de handgester som mottas.
Styrning av bilens rörelser
För att din handgestbil ska röra sig måste du definiera vad varje handgest betyder. Här är några grundläggande kommandon:
- Framåt: Rör handen framåt
- Bakåt: Rör handen bakåt
- Vänster: Rör handen åt vänster
- Höger: Rör handen åt höger
- Stanna: Hela handen upp
Genom att använda accelerometrar eller gyroskop kan du fånga dessa gester och konvertera dem till kommandon som bilen kan förstå. Genom att programmera bilen att reagera på dessa gester har du nu en gestkontrollerad bil!
Testa bilen och felsökning
Nu när allt är på plats är det dags att testa din gesture-controlled car. Första steget är att kontrollera att all elektronik fungerar som den ska. Då kan du flytta bilen framåt, bakåt och sidled när du utför de angivna gesterna.
Felsökningstips
- Kontrollera kopplingarna – se till att allt är korrekt kopplat.
- Verifiera att koden har laddats korrekt till Arduino.
- Kontrollera batteriets status – låga batterinivåer kan påverka bilens prestanda.
Avancerade funktioner att utforska
När din handgestkontrollerade bil fungerar kan du utforska mer avancerade funktioner. Här är några idéer:
- Automatiskt hinder undvikande: Använd ultraljudssensorer för att stoppa bilen innan den kolliderar med ett hinder.
- Ruttplanering: Implementera en algoritm som gör att bilen kan navigera från punkt A till B baserat på handgester-för att styra rutt.
- Livestreaming av video: Anslut en kamera så att du kan se vad bilen ser i realtid.
Slutsats och framtida förbättringar
Att bygga en gesture control car är en rolig och lärorik process. Från att installera NRF24L01 till att programmera handgester, kan varje steg ge nya insikter i teknikens värld. Genom att följa de steg som nämnts här kan du nå en bra grund för ditt arduino bilprojekt.
Det finns också många vägar att utforska för framtida förbättringar. Kanske vill du förbättra programmeringen, optimera förhållandet mellan motorerna och batteriet, eller till och med integrera nya sensorer för att utöka bilens funktionalitet.
Med rätt verktyg och lite tålamod kan du skapa och förbättra din handgestkontrollerade bil och göra det till en fantastisk prydnad på både teknik- och hobbyområdet.
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? Gesture-Controlled Car with NRF24L01: How to Build It Du kan se mer här NanoPi.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll