Otto DIY: Skapa en IR-fjärrkontroll till ditt projekt
Otto DIY: Skapa en IR-fjärrkontroll till ditt projekt
Välkommen till vår guide om hur du kan skapa en IR-fjärrkontroll för ditt projekt med Otto DIY! I denna artikel kommer vi att gå igenom allt du behöver veta för att bygga en fjärrkontroll som kan styra din Otto DIY robot. Med hjälp av en infraröd fjärrkontroll kan du enkelt styra din robot och ge den olika kommandon. En fjärrkontroll gör det mycket enklare att interagera med din robot och öppnar upp för många roliga och kreativa möjligheter.
Här kommer vi att beskriva de olika stegen för att sätta ihop din IR-fjärrkontroll, inklusive behövligt material, hur du programmerar din Arduino och hur du monterar komponenterna. Oavsett om du är nybörjare eller en erfaren teknikentusiast, kommer du att få praktiska tips som hjälper dig att lyckas med ditt projekt. Låt oss dyka in i världen av Otto DIY och lär oss hur vi kan skapa en funktionell IR-fjärrkontroll!
Introduktion
Otto DIY är en fascinerande plattform för att bygga och programmera robotar. Med sin modulära design och användarvänliga gränssnitt, erbjuder Otto DIY oändliga möjligheter för kreativitet och lärande. Genom att bygga din egen robot kan du få praktiska erfarenheter inom programmering, elektronik och robotik. En av de mest intressanta funktionerna med Otto DIY är möjligheten att integrera en IR-fjärrkontroll för att styra robotens rörelser, vilket gör interaktionen enklare och roligare.
Vad är Otto DIY?
Otto DIY är en robotplattform som gör det lätt för alla att bygga sina egna robotar. Den levereras som en byggsats och kräver minimal programmering för att sätta ihop. Plattformen har blivit populär bland både nybörjare och avancerade användare, tack vare dess flexibilitet och anpassningsmöjligheter. Med hjälp av Otto DIY kan användare utforska lättanvända programmeringsspråk som Arduino för att styra robotar.
Robotens design gör den kapabel att utföra olika rörelser och uppgifter, vilket gör den till en utmärkt plattform för utbildning och experimentation. Att bygga en IR-fjärrkontroll till din Otto DIY robot kan verkligen förbättra användarupplevelsen och göra det möjligt för användare att styra roboten på ett mer intuitivt sätt.
Material och verktyg du behöver
För att skapa din IR-fjärrkontroll till Otto DIY, behöver du samla några viktiga material och verktyg. Här är en lista över de komponenter du kommer att behöva:
- Arduino Uno eller Nano
- IR-mottagare (t.ex. TSOP4838)
- IR-fjärrkontroll (standardmodell)
- Servomotorer (ex. MG996R)
- USB-kabel för programmering
- Brödbräda och jumper kablar
- Buzzer (august sound buzzer)
- Ultraljudssensor (HC-SR04)
- Strömkälla (batteri eller USB)
Utöver dessa material, behöver du också vissa verktyg för att bygga och programmera din Otto DIY robot. Här är några rekommenderade verktyg:
- En dator med Arduino IDE installerad
- Sax
- Lödpenna (om det behövs för permanent koppling)
- Skruvmejsel
Steg-för-steg guide till IR-fjärrkontrollen
Nu när du har allting på plats, låt oss gå igenom en ste-get steg guide för att skapa din IR-fjärrkontroll. Vi kommer att börja med programmering av din Arduino och gå vidare till montering av komponenterna.
Programmera din Arduino
Innan vi börjar montera komponenterna behöver vi först programmera vår Arduino för att känna igen signalerna från den IR-fjärrkontroll vi ska använda. För detta räcker det med att installera en fåtal bibliotek i Arduino IDE. Här är stegen:
- Öppna Arduino IDE på din dator.
- Klicka på "Sketch" -> "Include Library" -> "Manage Libraries".
- Sök efter "IRremote" och installera biblioteket av Paul Stoffregen.
- Skapa ett nytt sketchdokument och skriv ner följande kod:
#includeconst int recv_pin = 11; IRrecv irrecv(recv_pin); decode_results results; void setup() { Serial.begin(9600); irrecv.enableIRIn(); // Starta IR-mottagning } void loop() { if (irrecv.decode(&results)) { Serial.print("Kod: "); Serial.println(results.value, HEX); // Skriv ut den mottagna koden irrecv.resume(); // Klara mottagaren för nästa signal } }
Denna kod kommer att möjliggöra för Arduino att läsa av inkommande signaler från IR-fjärrkontrollen. Ladda upp koden till din Arduino och öppna sedan "Serial Monitor" i Arduino IDE för att se de koder som skickas från fjärrkontrollen när du trycker på knapparna.
Montering av komponenter
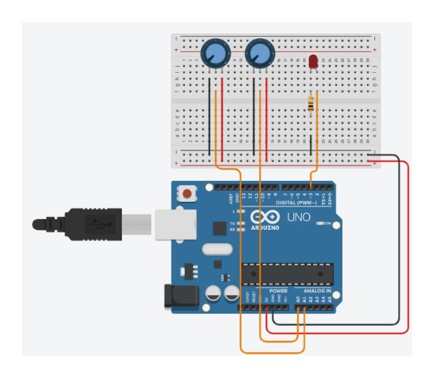
När du har programmerat din Arduino och samlat alla komponenter, är det dags att montera dem för att skapa din IR-fjärrkontroll med Otto DIY. Nedan följer stegen för installation:
- Anslut IR-mottagaren till Arduino:
- VCC till 5V
- GND till GND
- Signalpin till pin 11
- Anslut servomotorerna till Arduino:
- Styrpinnen till de angivna pins (ex. pin 9, pin 10, etc.)
- VCC och GND till båda servomotorerna
- Anslut buzzer och ultraljudssensor till Arduino:
- Connect the ultrasonic sensor to pins 2 and 3.
- Connect the buzzer to a digital pin, i.e. pin 8.
Se till att alla anslutningar är ordentligt gjorda för att undvika problem senare. Du kan använda en brödbräda för att underlätta kopplingarna.
Testa och kalibrera din robot
Efter att du har monterat alla komponenter, är nästa steg att testa din robot och kalibrera den. Du kan använda en enkel kod för att styra robotens rörelser baserat på de kodresultat du fick tidigare. Använd koden nedan för att implementera IR-kontrollen:
#include#include const int recv_pin = 11; IRrecv irrecv(recv_pin); decode_results results; Servo leftLeg; Servo rightLeg; int leftLegPin = 9; int rightLegPin = 10; void setup() { Serial.begin(9600); irrecv.enableIRIn(); leftLeg.attach(leftLegPin); rightLeg.attach(rightLegPin); } void loop() { if (irrecv.decode(&results)) { switch (results.value) { case 0x24: // Ersätt med koden från din fjärrkontroll för framåt leftLeg.write(180); // Gå framåt rightLeg.write(0); break; case 0x32: // Ersätt med koden för bakåt leftLeg.write(0); // Gå bakåt rightLeg.write(180); break; // Lägg till fler fall vid behov (svänga, stanna osv.) default: leftLeg.write(90); // Stanna rightLeg.write(90); break; } irrecv.resume(); } }
Ladda upp koden och testa din robot med IR-fjärrkontrollen. Justera värdena för servomotorerna för att kalibrera robotens rörelser och göra dem smidigare.
Vanliga problem och lösningar
När du arbetar med Otto DIY och IR-fjärrkontroll, kan du stöta på vissa problem. Här är några vanliga problem och tips på hur du kan lösa dem:
- Problem: IR-mottagaren reagerar inte på någon signal.
Lösning: Kontrollera att mottagaren är kopplad korrekt till den rätta pinnen och få ström. Testa med olika avstånd till fjärrkontrollen och se till att den fungerar. - Problem: Robotens rörelser fungerar inte som avsett.
Lösning: Kontrollera din kod för eventuell felstavning och verifiera att värdena för servomotorerna är korrekt inställda och att du har angett rätt kontrolkoder. - Problem: Buzzer fungerar inte.
Lösning: Kontrollera att den är korrekt ansluten och att rätt pin används i din kod.
Avslutning
Att skapa en IR-fjärrkontroll till din Otto DIY robot är ett roligt och lärorikt projekt. Genom att följa vår guide har du nu lärt dig hur du programmerar din Arduino, monterar komponenterna och testar din robot. Med denna kunskap kan du enkelt bygga vidare och experimentera med din robotik. Överväg att lägga till fler funktioner, som ljus eller ljud, för att göra din robot ännu mer interaktiv.
Dela ditt projekt!
Vi är spända på att se dina framsteg med Otto DIY och din IR-fjärrkontroll! Glöm inte att dela dina erfarenheter och resultat med andra entusiaster. Kanske har du till och med några egna tips och tricks som kan hjälpa andra? Tillsammans kan vi skapa en gemenskap av kreatörer som inspirerar varandra. Lycka till med ditt projekt!
This structured HTML article covers the requested topics about building an IR remote control for the Otto DIY robot while incorporating the specified keywords naturally throughout.
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? Otto DIY: Skapa en IR-fjärrkontroll till ditt projekt Du kan se mer här NanoPi.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll