WALTER - Arduino Fotofågelinsekten: En Guide till Fotoforer
Välkommen till vår omfattande guide om "WALTER - Arduino Fotofågelinsekten: En Guide till Fotoforer". Denna sida är skriven för att ge dig en djupgående förståelse för hur WALTER fungerar och hur du kan bygga och programmera din egen robot. I den här artikeln kommer vi fokusera på vad en fotofor är, dess funktioner, och hur man kan använda Arduino för att styra en robot liknande WALTER. Att dyka ner i världen av robotteknik gör att vi kan kombinera vetenskap och kreativitet på ett unikt sätt.
Vi kommer att gå igenom alla aspekter av WALTER, inklusive dess komponenter, tekniska specifikationer och programmering. Om du någonsin har undrat vad en fotofor är eller dess betydelse, är detta den perfekta platsen att lära sig mer. Oavsett om du är nybörjare inom programmering eller har erfarenhet av robotik, kommer du att hitta användbar information i denna guide. Låt oss dyka in i världen av WALTER och upptäcka hemligheterna bakom denna fascinerande robot!
Vad är WALTER?
WALTER är en fyrbent robot som bygger på Arduino-plattformen. Den är designad för att mimera beteenden hos naturliga fotoforer, vilket är organismer eller enheter som reagerar på ljus. Med hjälp av servon och sensorik kan WALTER röra sig i sin omgivning och navigera genom att följa ljus- och hinderkällor. Fotoforer har en intressant betydelse inom biologin, men i denna kontext syftar det på robotar som är skapade för att interagera och reagera på sin miljö, mycket likt hur djur gör.
Komponenter och teknisk specifikation
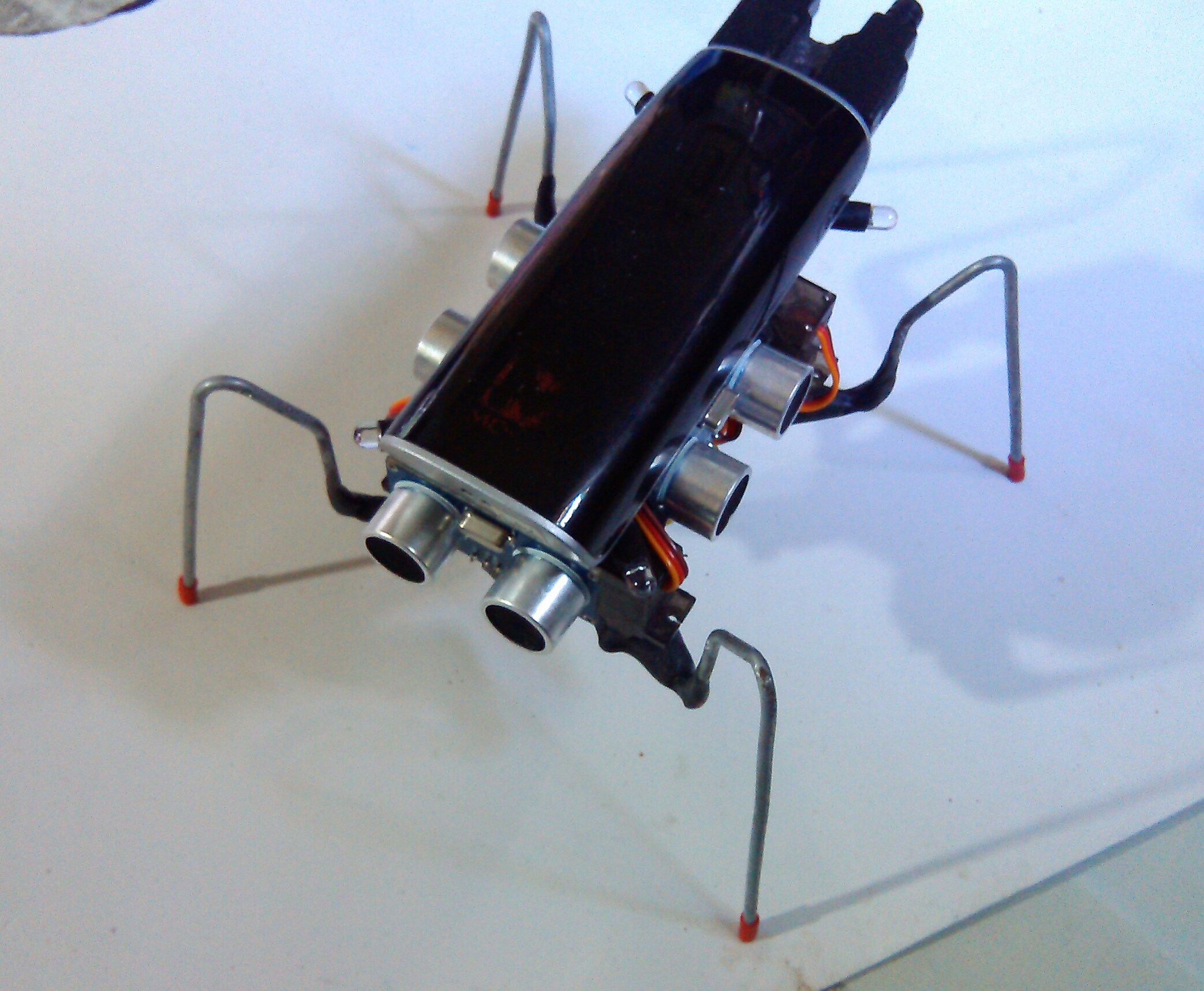
För att förstå hur WALTER fungerar, är det viktigt att kolla på de komponenter som används. WALTER använder fem servon för att styra sina ben, vilket gör den kapabel att förflytta sig framåt, bakåt och till och med rotera. Den är även utrustad med tre ultraljudssensorer som används för att upptäcka avstånd till hinder samt fyra fotodioder som registrerar ljus.
- Servon: 5 stycken, ansvarar för robotens benrörelser.
- Ultraljudssensorer: 3 stycken, används för att mäta avstånd till hinder.
- Fotodioder: 4 stycken, registrerar ljusnivåer och hjälper roboten att navigera.
- Arduino-kontroller: Hjärnan bakom robotens funktioner och programmering.
Så här fungerar WALTER
WALTER är designad för att enkelt kunna styra sina rörelser baserat på den data som den samlar in från sina sensorer. Genom att registrera ljusförändringar och hinder kan WALTER anpassa sin väg för att undvika kollisioner och för att följa ljus. På så sätt efterliknar WALTER en typ av fotofor beteende, en egenskap som finns i många djur som svarar på ljus. Detta initierar en grundläggande förståelse av vad fotofor betyder i både biologiska och tekniska sammanhang.
Kalibrering av servon
Innan WALTER kan börja röra sig, måste servona kalibreras korrekt. Kalibreringsprocessen säkerställer att varje servo rör sig till de rätta positionerna när kommandon ges. I koden definieras centrala vinklar och impulslängder för varje servo, vilket gör det möjligt för roboten att vibrera och svänga på ett kontrollerat sätt. För att utföra kalibreringen, följ dessa steg:
- Anslut WALTER till datorn via USB.
- Öppna Arduino IDE och ladda upp kalibreringskoden.
- Justera parametrarna för varje servo i koden tills rörelserna är smidiga och precisa.
- Spara inställningarna och testa servorna genom att köra grundprogrammet.
Navigationen hos WALTER bygger på två huvudsakliga sensorers funktionalitet: ultraljudssensorerna och fotodioderna. Ultraljudssensorerna skickar ut ljudvågor och mäter tiden det tar för vågorna att reflekteras tillbaka. Genom att beräkna avståndet till hinder kan WALTER navigera genom att undvika kollisioner. Samtidigt används fotodioderna för att detektera ljus och styra rörelser mot ljuskällor, vilket imiterar beteendet hos vissa fotoforer.
Programmering av roboten
Att programmera WALTER är en avgörande del av robotens funktionalitet. Användaren kan justera parametrar för servoaktivering och sensorhantering genom Arduino IDE. Genom att skriva och ändra koden kan du styra exakt hur WALTER reagerar på sin miljö. Här följer ett exempel på hur du kan definiera en enkel rörelse i koden:
void moveForward() {
// Aktivera framåtrörelse
servo1.write(90);
servo2.write(90);
// ... logik för övriga servon
}
Genom att experimentera med olika kodsnuttar kan du få WALTER att utföra avancerade mönster och beteenden, allt baserat på sensorregistreringar.
Anpassning av beteende
En av de mest spännande aspekterna av WALTER är möjligheten att anpassa dess beteende. Genom att justera kodparametrar och lägga till nya funktioner kan du skräddarsy WALTER så att den beter sig på exakt det sätt du vill. Du kan t.ex. programmera den att reagera på olika ljusstyrkor eller att utföra specifika rörelser när den närmar sig ett hinder. Denna grad av anpassning ger användare en fantastisk möjlighet att utforska och experimentera.
Vanliga problem och lösningar
Trots att WALTER är en innovativ robot kan det ibland uppstå problem. Här är några vanliga problem och hur man kan lösa dem:
- Robot rör sig inte: Kontrollera anslutningarna och kalibrera servona igen.
- Felaktiga rörelser: Gå igenom kodparametrarna för servona och justera dem.
- Sensorer reagerar inte: Kontrollera att sensorerna är korrekt anslutna och fungerar som de ska.
Slutsats
WALTER är en fantastisk plattform för att lära sig om robotik och programmering. Genom att använda ultraljudssensorer och fotodioder kan WALTER navigera i sin omgivning på ett intelligent sätt och imitera beteendet hos en verklig fotofor. Genom kalibrering, programmering och experimentering kan användaren verkligen få ut det mesta av projektet och anpassa sin robot.
Att lära sig om WALTER och fotoforer ger oss en förståelse för interaktionen mellan teknik och biologi. Vi uppmanar dig att experimentera och använda denna guide som en utgångspunkt för att skapa och styra din egen robot. Med tålamod och kreativitet kan du göra stora framsteg inom robotteknik!
Referenser
Den här guiden har samlat in information från flera källor, inklusive artiklar om robotteknik, Arduino-projekt och forskning om fotoforer och deras beteenden. För att förstå djupare rekommenderas det att läsa vidare om ämnena och göra praktiska projekt.
Tack för att du läste vår artikel, du kan se alla artiklar i våra webbkartor eller i Sitemaps
Tyckte du att den här artikeln var användbar? WALTER - Arduino Fotofågelinsekten: En Guide till Fotoforer Du kan se mer här NanoPi.Tack för att du läser innehållet i Maker Electronics
Leave a Reply

Se mer relaterat innehåll